Понятие
об оптимизации химико-технологических процессов и систем.
Постановка
задачи оптимизации
Оптимизация в широком смысле слова находит применение в
науке, технике и в любой другой области человеческой деятельности.
Оптимизация - целенаправленная деятельность,
заключающаяся в получении наилучших результатов при соответствующих условиях.
Поиски
оптимальных решений привели к созданию специальных математических методов и уже
в 18 веке были заложены математические основы оптимизации (вариационное исчисление,
численные методы и др). Однако до второй половины 20 века методы оптимизации во
многих областях науки и техники применялись очень редко, поскольку практическое
использование математических методов оптимизации требовало огромной
вычислительной работы, которую без ЭВМ реализовать было крайне трудно, а в ряде
случаев - невозможно. Особенно большие трудности возникали при решении задач
оптимизации процессов в химической технологии из-за большого числа параметров и
их сложной взаимосвязи между собой. При наличии ЭВМ задача заметно упрощается.
Постановка
задачи оптимизации предполагает существование конкурирующих свойств процесса,
например:
-
количество продукции - расход сырья"
-количество
продукции - качество продукции"
Выбор
компромиссного варианта для указанных свойств и представляет собой процедуру решения
оптимизационной задачи.
При постановке задачи оптимизации необходимо:
1.
Наличие объекта оптимизации и цели оптимизации. При этом формулировка каждой задачи
оптимизации должна требовать экстремального значения лишь одной величины, т.е.
одновременно системе не должно приписываться два и более критериев оптимизации,
т.к. практически всегда экстремум одного критерия не соответствует экстремуму
другого.
Типичный
пример неправильной постановки задачи оптимизации:
"Получить
максимальную производительность при минимальной себестоимости".
Ошибка заключается в том, что ставится задача
поиска оптимума 2-х величин, противоречащих друг другу по своей сути.
Правильная постановка задачи могла быть следующая:
а) получить
максимальную производительность при заданной себестоимости;
б) получить
минимальную себестоимость при заданной производительности;
В
первом случае критерий оптимизации - производительность
а во втором - себестоимость.
2.
Наличие ресурсов оптимизации, под которыми понимают возможность выбора значений
некоторых параметров оптимизируемого объекта. Объект должен обладать
определенными степенями свободы - управляющими
воздействиями.
3.
Возможность количественной оценки оптимизируемой величины, поскольку только в
этом случае можно сравнивать эффекты от выбора тех или иных управляющих воздействий.
4. Учет
ограничений.
Обычно оптимизируемая величина связана с экономичностью
работы рассматриваемого объекта (аппарат, цех, завод ). Оптимизируемый вариант
работы объекта должен оцениваться какой-то количественной мерой-критерием оптимальности.
Критерием оптимальности называется
количественная оценка оптимизируемого качества объекта.
На
основании выбранного критерия оптимальности составляется целевая функция,
представляющая собой зависимость критерия оптимальности от параметров, влияющих
на ее значение. Вид критерия оптимальности или целевой функции определяется
конкретной задачей оптимизации.
Таким
образом, задача оптимизации сводится к нахождению экстремума целевой функции.
Наиболее
общей постановкой оптимальной задачи является выражение критерия оптимальности
в виде экономической оценки (производительность, себестоимость продукции,
прибыль, рентабельность).Однако в частных задачах оптимизации, когда объект
является частью технологического процесса, не всегда удается или не всегда
целесообразно выделять прямой экономический показатель, который бы полностью
характеризовал эффективность работы рассматриваемого объекта. В таких случаях
критерием оптимальности может служить технологическая характеристика, косвенно
оценивающая экономичность работы агрегата (время контакта, выход продукта,
степень превращения, температура). Например устанавливается оптимальный темпе
ратурный
профиль, длительность цикла - "реакция - регенерация". Но в любом
случае любой критерий оптимальности имеет экономическую природу.
Критерий
оптимальности должен иметь ясный физический смысл ,отражать наиболее существенные
стороны процесса , должен иметь
количественную оценку.
В том случае, когда случайные возмущения невелики и их
воздействие на объект можно не учитывать, критерий оптимальности может быть
представлен как функция входных, выходных и управляющих параметров: R=R(X1, X2,...,XN, Y1,Y2,...,YN, U1,U2,..., UN)
Так
как Y=f (U), то при фиксированных Х можно записать: R=R( U1,U2,..., UN)
При
этом всякое изменение значений управляющих параметров двояко сказывается на
величине R:
-
прямо, так как управляющие параметры
непосредственно входят в выражение критерия оптимизации;
-
косвенно - через
изменение выходных параметров процесса, которые зависят от управляющих.
Как правило, для
конкретных задач оптимизации химических производств критерий оптимальности
не может быть записан в виде
аналитического выражения.
В принципе, для оптимизации вместо математической модели
можно использовать и сам объект, однако оптимизация опытным путем имеет ряд
существенных недостатков:
а)
необходим реальный объект;
б)
необходимо изменять технологический режим в значительных пределах, что не
всегда возможно;
в)
длительность испытаний и сложность обработки данных. Наличие математической
модели (при условии, что она достаточно надежно описывает процесс) позволяет
значительно проще решить задачу оптимизации аналитическим либо численным
методами.
Итак, для решения задачи оптимизации
необходимо:
а)
составить математическую модель объекта оптимизации,
б)
выбрать критерий оптимальности и составить целевую функцию,
в)
установить возможные ограничения, которые должны накладываться на переменные,
г) выбрать метод оптимизации, который позволит найти экстремальные
значения искомых величин.
Классификация задач оптимизации.
Принято различать задачи статической оптимизации для процессов, протекающих в установившихся
режимах, и задачи динамической
оптимизации.
В первом случае решаются вопросы создания и реализации
оптимальной модели процесса, во втором -задачи создания и реализации системы
оптимального управления процессом при неустановившихся режимах эксплуатации.
Если требуется определить экстремум целевой функции без
задания условий на какие-либо другие величины, то такая оптимизация называется безусловной. Такие критерии обычно
используются при решении частных задач оптимизации (например, определение
максимальной концентрации целевого продукта, оптимального времени пребывания
реакционной смеси в аппарате и т.п.).
Если необходимо установить экстремум целевой функции при
некоторых условиях, которые накладываются на ряд других величин (например,
определение максимальной производительности при заданной себестоимости,
определение оптимальной температуры при ограничениях по термостойкости
катализатора и др.), то такая оптимизация называется условной.
Процедура решения задачи оптимизации обязательно включает,
помимо выбора управляющих параметров, еще и установление ограничений на эти
параметры (термостойкость, взрывобезопасность, мощность перекачивающих
устройств).
Ограничения могут накладываться как по технологическим, так
и по экономическим соображениям.
В зависимости от управляющих параметров различают следующие задачи :
· оптимизация при одной управляющей переменной- одномерная оптимизация,
· оптимизация при нескольких управляющих переменных – многомерная оптимизация,
· оптимизация при неопределённости данных,
· оптимизация с непрерывными ,дискретными и смешанным типом значений управляющих воздействий.
В зависимости от критерия оптимизации различают:
·
с одним критерием
оптимизации- критерий оптимальности
единственный.
· со многими критериями. Для решения задач со многими критериями используются специальные методы оптимизации.
РЕГЛАМЕНТИРОВАННЫЕ И ОПТИМИЗИРУЮЩИЕ ПРОЕКТНЫЕ ПЕРЕМЕННЫЕ ХТС.
При
исследовании ХТС часто возникают немалые
сложности при выборе свободных ИП, имеющих первостепенное значение для
однозначного математического представления процесса функционирования ХТС. Это
обусловлено тем, что общую универсальную формулу для числа степеней свободы
любой ХТС, указывающую, какие именно ИП системы должны быть выбраны как
свободные (независимые) переменные, получить невозможно, так как каждая
исследуемая ХТС строго индивидуальна по характеру процессов функционирования.
Однако можно указать некоторые основные рекомендации по выбору свободных переменных
системы, которых следует придерживаться при решении задач проектирования и оптимизации
ХТС.
Все информационные переменные, полностью характеризующие функционирование системы, подразделяют на проектные (заданные) и расчетные (искомые) переменные. В качестве свободных ИП системы из всего множества информационных переменных могут быть выбраны только лишь проектные переменные ХТС.
Проектные
переменные — это такие ИП, которые характеризуют основную цель функционирования
ХТС, воздействие на систему или подсистему внешней окружающей среды, взаимосвязь
данной системы с другими ХТС и возможность оптимизации процессов ее функционирования
в соответствии с некоторым критерием качества.
Расчетные
{искомые) переменные — это ИП, определение которых представляет собой цель
проектирования и исследования системы.
Среди проектных переменных выделяют регламентированные и оптимизирующие переменные ХТС.
Регламентированные
переменные определяют основную цель функционирования ХТС, влияние внешней
среды на систему, взаимодействие данной системы с другими системами.
Большая
часть этих переменных находится по данным проектного задания и требованиям
технологических условий.
К
регламентированным переменным относят следующие технологические параметры ХТС:
массовый расход, состав, температуру и давление потоков сырья (например, для
систем очистки
технологических газов); массовый
расход, состав и температуру готовых продуктов; параметры потоков теплоносителей
на входе подсистем с химическими реакторами; тип и активность катализаторов
химических превращений; параметры потоков теплоносителей или хладоагентов на
входе и выходе подсистем с теплообменниками, а также параметры технологических
режимов функционирования элементов или подсистем, которые обусловливают протекание
технологических процессов в требуемом направлении.
Другую
группу регламентированных переменных составляют конструкционные параметры элементов
или подсистем: конструкционный тип аппаратов; высота реакционного объема; диаметр
и высота слоя катализатора; конструкционные размеры аппарата и т. п.
Таким образом, некоторое число степеней свободы ХТС, согласно проектному заданию и технологическим условиям, расходуют на регламентированные переменные. Определив оставшееся неизрасходованным число степеней свободы, необходимо решить, какие именно ИП нужно выбрать дополнительно для однозначной характеристики процесса функционирования ХТС.
Оставшиеся
степени свободы следует отнести к оптимизирующим переменным (см. ниже),
варьирование численных значений которых при заданных регламентированных
переменных обеспечивает оптимизацию процесса функционирования системы в
соответствии с некоторой целевой функцией. Как правило, данная функция имеет
экономический характер. Это обусловлено тем, что многие варианты выбора
свободных информационных переменных часто эквивалентны друг другу в
технологическом отношении, но могут быть по-разному оценены с экономической
точки зрения. Перед инженером стоит задача из всех возможных вариантов наборов
свободных ИП выбрать такой, который являлся бы экономически оптимальным.
Реальный
процесс функционирования ХТС
протекает при наличии определенных ограничений на качества и количественные
значения технологических и конструкционных переменных системы. Так, например,
по условиям обеспечения взрывобезопасности функционирования ХТС для подсистем,
в которых протекают окислительные процессы, начальные концентрации реагентов
должны быть меньше предела взрываемости; температура физических потоков системы
ограничена возможностями теплообменников и нагревательных устройств;
максимально допустимое изменение давления обусловлено возможностями насосов
или компрессоров; по
условиям
сохранности катализатора иногда требуется, чтобы концентрации некоторых компонентов
в реакторе не уменьшались ниже соответствующего уровня и т. д.
Конструкционные параметры ограничены требованиями ГОСТ, межведомственных и ведомственных" нормалей на типы и геометрические размеры оборудования, а также соображениями
механической прочности и надежности оборудования. Ряд ограничений имеется также на информационные взаимодействия элементов или подсистем.
Наличие
ограничений на информационные переменные ХТС вызывает трудности, препятствующие
достижению того оптимального решения, которое можно было бы получить без учета
ограничений. Для обеспечения корректности постановки задачи исследования процессов
фун-
кционирования ХТС и резкого
сокращения объема вычислительных процедур по оптимизации данной системы в качестве
оптимизирующих проектных переменных необходимо прежде всего выбирать информационные
переменные двух видов:
1) ИП,
принимающие, согласно проектному заданию и технологическим условиям, дискретные
значения (например, конструкционный тип аппаратов; стандартизированные или нормализованные
геометрические размеры оборудования; допустимые типы катализатора или растворителя
и т. д.);
2) ИП, которые по требованиям проектного задания и технологических условий или вследствие взаимодействия элементов системы между собой имеют узко ограниченный диапазон возможных значений.
Так,
например, если по технологическим условиям температура t, при которой происходит химическое превращение компонентов в
реакторе ХТС, ограничена узким диапазоном значений inf t < t
< sup t, то эту
ИП целесообразно выбрать как оптимизирующую проектную переменную системы.
Изменяя величину t в заданном диапазоне температур, отыскивают оптимальный
технологический режим в реакторе. Если же эту информационную переменную t
принять как базисную (зависимую) переменную, то ее численное значение можно
определить только после решения системы информационных связей математической
модели и, следовательно, лишь тогда убедиться, удовлетворяет ли полученный оптимальный
технологический режим ограничению на температуру в реакторе. Такое решение
задачи оптимизации требует значительных затрат расчетного времени.
Отметим, что деление проектных переменных ХТС на регламентированные и оптимизирующие несколько относительно, поскольку в зависимости от конкретных условий функционирования системы одни и те же информационные переменные могут быть либо оптимизирующими, либо регламентированными. Так, если поток исходной реакционной смеси посту-
пает в реакторную подсистему из какой-либо другой подсистемы и его массовый расход, состав и давление нельзя изменять по некоторой желаемой программе или стабилизировать, то эти
информационные переменные будут регламентированными, а в противном случае — оптимизирующими переменными системы.
При решении
задач проектирования оптимальных ХТС оптимизирующими ИП являются как
технологические, так и конструкционные параметры, при оптимизации действующих
ХТС — только технологические параметры, обеспечивающие наилучшие показатели
функционирования.
Пример 1. Определить
число степеней свободы и выбрать регламентированные и оптимизирующие свободные
ИП для теплообменника
|
Рис. Структурная схема и информационные переменные
теплообменника |
F — площадь
поверхности теплообмена; h — конструкционный тип теплообменника; K— общий коэффициент теплопередачи; W1, W2 — массовые расходы охлаждаемой жидкости и
хладоагента;
|
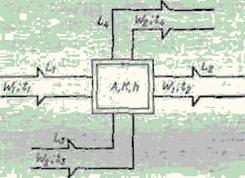
Теплообменник
предназначен для охлаждения потока горячей жидкости (массовый расход W1) от температуры ![]() до до температуры
до до температуры ![]() . В качестве хладоагента в ХТС используют поток воды с
температурой
. В качестве хладоагента в ХТС используют поток воды с
температурой ![]() .Функционирование теплообменника полностью характеризуется 11
информационными переменными:W1,W2 — массовые расходы горячего потока и хладоагента; h — конструкционный тип теплообменника (противоточный,
прямоточный» кожухотрубчатый, «труба в трубе» и т. п.); F — площадь
поверхности теплообмена; Q — количество
тепла, переданное потоком горячей жидкости потоку хладоагента; K — общий коэффициент теплопередачи;
.Функционирование теплообменника полностью характеризуется 11
информационными переменными:W1,W2 — массовые расходы горячего потока и хладоагента; h — конструкционный тип теплообменника (противоточный,
прямоточный» кожухотрубчатый, «труба в трубе» и т. п.); F — площадь
поверхности теплообмена; Q — количество
тепла, переданное потоком горячей жидкости потоку хладоагента; K — общий коэффициент теплопередачи; ![]() —
среднелогарифмическая движущая сила теплопередачи;
—
среднелогарифмическая движущая сила теплопередачи; ![]() ,
, ![]() ,
,![]() ,
,![]() — температуры горячего потока и хладоагента на входе в
теплообменник и на выходе из него.
— температуры горячего потока и хладоагента на входе в
теплообменник и на выходе из него.
Математическую модель
теплообменника представляют в виде пяти информационных связей: основные
уравнения теплопередачи: ![]() (1)
(1)  (2)
(2)
![]() (3)
(3) ![]() (4)
(4)
![]() (5)
(5)
где с и ![]() — теплоемкости
горячего потока и воды.
— теплоемкости
горячего потока и воды.
Таким образом, для исследуемого
теплообменника имеем: n = 5; m = 11;F = m-n = 6. В
соответствии с технологическими условиями функционирования теплообменника в
системе регламентированными ИП являются: W1, ![]() ,
, ![]() ,
,![]() .Общее число регламентированных переменных = 4. Число оптимизирующих
информационных переменных = 2.
.Общее число регламентированных переменных = 4. Число оптимизирующих
информационных переменных = 2.
Оптимизирующими переменными
выбираем конструкционный тип теплообменника h и массовый расход хладоагента W2. Варьирование этих оптимизирующих переменных обеспечит оптимизацию
функционирования теплообменника в ХТС. Численные значения базисных (искомых)
информационных переменных (F, Q, K, ![]() ,
,![]() ) получают после решения математической модели теплообменника.
) получают после решения математической модели теплообменника.
Пример
.Оптимизация системы теплообмена (рис.17). В трёх теплообменных аппаратах
осуществляется процесс нагрева основного потока
от 1000 C до 5000
C тремя вспомогательными с заданными
входными температурами. Известны коэффициенты теплопередачи :
K1=120 ![]() , K2= 80
, K2= 80![]() K3=40
K3=40![]()
w1=w2=W=100000
![]()
Необходимо
подобрать площади поверхностей теплообмена (м2) , чтобы критерий оптимизации F1+F2+F3 ,был минимальным.
Рис.
Математическое
описание рассматриваемого процесса представим в следующем виде:
|
W*(T1-100)=W(300-t1) W(300-t1)=K1*F1*
|
W*(T2-T1)=W(400-t2) W(400-t2)=K2*F2*
|
W*(500-T2)=W(600-t3) W(600-t3)=K3*F3*
|
Неизвестных 15 :
K1,K2,K3,F1,F2,F3,t1,t2,t3,T1,T2 ,W ,![]() ,
,![]() ,
,![]() .
.
Уравнений- 9,регламентированные переменные-4: K1,K2,K3, W.
Поисковых переменных – 2.
В качестве поисковых выбраны
переменные T1 и T2 , сначала
вычисляются значения ![]() ,
,![]() ,
,![]() ,затем вычисляются
значения F1,F2,F3,далее вычисляются значения t1,t2,t3.
,затем вычисляются
значения F1,F2,F3,далее вычисляются значения t1,t2,t3.
ОДНОМЕРНАЯ
ОПТИМИЗАЦИЯ
В данном
разделе не делается упор на поиск именно минимума, тем более что практически
все методы могут искать и минимум, и максимум при незначительных изменениях в
алгоритмах. Действительно для того, чтобы найти максимум (минимум) функции
нужно искать минимум (максимум) целевой функции с противоположным знаком.
В данном
разделе рассматриваются методы решения одномерных задач оптимизации вида
R(x) -> max ,![]() ,где х — скаляр, а и b — соответственно нижняя и верхняя граница значения переменной
x.В основном рассматриваются
алгоритмы, связанные с построением улучшающей последовательности. Решением
задачи называется х*, при котором R(x*) > R(x) для любого значения
,где х — скаляр, а и b — соответственно нижняя и верхняя граница значения переменной
x.В основном рассматриваются
алгоритмы, связанные с построением улучшающей последовательности. Решением
задачи называется х*, при котором R(x*) > R(x) для любого значения ![]() . При практическом решении задач не будем различать два значениях
. При практическом решении задач не будем различать два значениях
![]() и
и ![]() , ecли
, ecли ![]() ,где
,где ![]() — задаваемая погрешность решения.
— задаваемая погрешность решения.
Метод
сканирования
Метод
заключается в последовательном переборе всех значений ![]() с шагом
с шагом ![]() (погрешность решения)
с вычислением критерия оптимальности R в каждой
точке. Путем выбора наибольшего из всех вычисленных значений R и находится
решение задачи х *.
(погрешность решения)
с вычислением критерия оптимальности R в каждой
точке. Путем выбора наибольшего из всех вычисленных значений R и находится
решение задачи х *.
Достоинство
метода в том, что можно найти глобальный максимум критерия, если R(x) — многоэкстремальная
функция. К недостаткам данного метода относится значительное число вычислений R(x), что в случае
сложной функции R(x) требует существенных затрат времени.
Метод деления пополам
Метод
основан на делении текущего отрезка [a, b], где содержится искомый экстремум, на две равные
части с последующим выбором одной из половин, в которой локализуется максимум в
качестве следующего текущего отрезка. Экстремум локализуется путем сравнения
двух значений критерия оптимальности в точках, отстоящих от середины отрезка
на ![]() / 2, где
/ 2, где ![]() — погрешность решения
задачи оптимизации. Если R(x +
— погрешность решения
задачи оптимизации. Если R(x + ![]() /2) > R(x -
/2) > R(x - ![]() /2), то максимум располагается на правой половине текущего
отрезка [а, b],
/2), то максимум располагается на правой половине текущего
отрезка [а, b],
в противном
случае — на левой.
Рис. . Иллюстрация метода половинного деления
|
|
|
|
|
|
Процесс
поиска завершается при достижении отрезком [a, b] величины заданной погрешности ![]() .К недостаткам метода относится его работоспособность только
для одноэкстремальных функций R(x) (т.е. таких, которые содержат один экстремум того
типа, который мы ищем в задаче),так как в других случаях при сравнении двух
критериев в соседних точках невозможно правильно выбрать следующий интервал,
где находится максимум.
.К недостаткам метода относится его работоспособность только
для одноэкстремальных функций R(x) (т.е. таких, которые содержат один экстремум того
типа, который мы ищем в задаче),так как в других случаях при сравнении двух
критериев в соседних точках невозможно правильно выбрать следующий интервал,
где находится максимум.
Пример.
Дана функция R(x) = 100*sin(x+1). Найти максимум на интервале: [-1, 2]. Ошибка задается
по х: ![]() =0,05.Результаты
расчетов. Середина отрезка х= 0,5, значение критерия R =99.75, значение R(0,5 -
=0,05.Результаты
расчетов. Середина отрезка х= 0,5, значение критерия R =99.75, значение R(0,5 -![]() /2) =R(0,475) =
97.92, значение R(0,5 +
/2) =R(0,475) =
97.92, значение R(0,5 +![]() /2) =R(0,525)
=99.89. Следовательно, искомый максимум лежит в правой половине отрезка, т.е.
теперь отрезком является [0,5, 2J.
/2) =R(0,525)
=99.89. Следовательно, искомый максимум лежит в правой половине отрезка, т.е.
теперь отрезком является [0,5, 2J.
Метод
золотого сечения
Метод
основан на делении текущего отрезка [a, b] , где
содержится искомый экстремум, на две неравные части, подчиняющиеся правилу
золотого сечения, для определения следующего отрезка, содержащего максимум.

Рис. 15. Иллюстрация метода золотого сечения.
Золотое
сечение определяется по правилу: отношение всего отрезка к большей его части
равно отношению большей части отрезка к меньшей. Ему удовлетворяют две точки с
и d, расположенные симметрично
относительно середины отрезка.
![]() Если ab=1, ad=x, тогда
Если ab=1, ad=x, тогда ![]() x=0.38197
x=0.38197
Путем
сравнения R(c) и R(d) определяют следующий отрезок, где содержится
максимум. Если R(d) > R(c), то в качестве следующего отрезка выбирается
отрезок [a, c],

Если же R(d) < R(c), то —
отрезок [a, c].
Новый
отрезок снова делится на неравные части по правилу золотого сечения. Следует отметить,
что точка c и в том и другом случаях
входит в интервал поиска. Поэтому на каждой следующей итерации (кроме
"запуска" метода на исходном отрезке) нужно вычислять только одно значение
критерия оптимальности.
Существуют
аналитические формулы для расчета новой точки на отрезке, где находится максимальное
значение R(x), которую нетрудно получить:
![]()
![]()
Условие
окончания поиска — величина отрезка, содержащего максимум, меньше заданной погрешности.
Метод
обеспечивает более быструю сходимость к решению, чем многие другие методы, и
применим, очевидно, только для одноэкстремальных функций.
В
практических задачах под одноэкстремальной функцией понимают функцию, содержащую
один экстремум того типа, который ищется в задаче.
Пример.
Дана функция R(x)=sin(x+1).
Найти максимум на интервале: [-1,2]. Ошибка задается по х: e =0,05.
Результаты
расчетов. Для "запуска" метода найдем две симметричные точки золотого
сечения для отрезка [-1, 2]: x1 =0,146, x2 =0,854.
Значения
критериев в этих точках соответственно R(x1) =0,911, R(x2 =0,960.
Следовательно, новым отрезком является [0,146,2], внутри которого находится
максимальное из найденных значений R. Точка
золотого сечения для нового отрезка будет x3 =0,583, a
R(x3) =0,999
Метод параболической аппроксимации
Метод
заключается в замене нелинейной функции R(x) квадратичной
параболой R2(x), построенной по трем точкам, принадлежащим R(x), с
последующим нахождением тах параболической функции, используя аналитические
условия оптимальности: dR/dx=0.
На первом этапе в качестве исходных
трех точек используются x1 = а, x2=b и х3 =(а+b)/2. В этих точках вычисляется R(x) и по
полученным точкам R(x1), R(x2), R(x3) строится парабола
R2 = С2*x2 +С1*Х +С0, коэффициенты которой
находятся из решения соответствующей системы уравнений:R2(x1)=R(x1) , R2(x2)=R(x2) ,R2(x3)=R(x3)
Условие оптимальности приводит к
уравнению х4=С1/(2*С2), где x4 — точка максимума параболы R2(x) . Далее
выбирается новый отрезок, внутри которого находится точка х4, и, исполь
зуя x3, x4, строится
новая парабола, по которой уточняется положение максимума R(x) и т.д. до
тех пор, пока величина отрезка, внутри которого находится максимум, не будет
меньше заданной погрешности e. Таким
образом, метод имеет итерационный характер.
К
достоинству метода относится высокая скорость сходимости к оптимуму, хотя
метод может не всегда сходиться к нему.
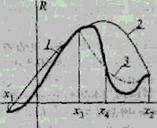
На рис. приведены два случая применения метода параболической
аппроксимации:
а) рассмотрена ситуация, когда метод
параболической аппроксимации сходится к решению, уже на третьем этапе парабола,
построенная по точкам х3,х4, x5 практически
совпадает с исходной функцией;
б) парабола не имеет максимума уже на втором
этапе.
|
a) |
b) |
|
Рис. 16. Иллюстрация метода параболической
аппроксимации: |
|
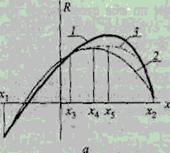
а — решение
найти можно;
б — решение
найти нельзя;
1 — функция, экстремум которой ищется;
2 — аппроксимирующая парабола первого этапа,
построенная по точкам х1, х2, х3;
3 —
аппроксимирующая парабола второго этапа, построенная по точкам х2, х3, х4;
x3 — середина исходного интервала;
x4 —точка максимума первой параболы;
х5 — точка
максимума второй параболы
Пример.
Дана
функция R(x) = sin(x+1).Найти максимум на интервале: [-1, 2]. Ошибка
задается по х: e=0,05.Результаты
расчетов.
Первая аппроксимирующая парабола
строится по точкам:
x1=
-1 ,R(-1)=0, x2=0.5,R(0.5)=0.997,x3=2,R(2)=0.141. Запишем
систему уравнений для нахождения коэффициентов параболы:
Решением
этой системы является С2 =-0,41197, С1 =0,459012, С0 =0,87089.
Находим х, при котором парабола
имеет максимум: ![]() ,при этом R
=0,99990609. По этой точке, а также по второй и третьей исходным точкам, лежащим
по обе стороны от точки максимума параболы, аналогично строится вторая
парабола, максимум которой оказывается в точке х =0,578, а R =0,999. Разница между двумя точками максимума менее
заданной погрешности, следовательно, можно заканчивать поиск.
,при этом R
=0,99990609. По этой точке, а также по второй и третьей исходным точкам, лежащим
по обе стороны от точки максимума параболы, аналогично строится вторая
парабола, максимум которой оказывается в точке х =0,578, а R =0,999. Разница между двумя точками максимума менее
заданной погрешности, следовательно, можно заканчивать поиск.
В этом методе
всего четыре раза вычислялся критерий оптимальности.
Многомерная оптимизация.
Концепция методов.
Математическая
постановка задачи имеет следующий вид:
Задачу условной оптимизации
сформулируем в традиционном виде:
Найти
минимум целевой функции ![]() по поисковым переменным
по поисковым переменным
![]() при наличии
ограничений:
при наличии
ограничений:
·
на поисковые переменные
![]() , l=1(1)L; L-число поисковых переменных.
, l=1(1)L; L-число поисковых переменных.
·
на поисковые переменные в виде функциональных неравенств ![]() , j=1(1)J; J- число функциональных неравенств.
, j=1(1)J; J- число функциональных неравенств.
·
на поисковые переменные в виде функциональных
равенств ![]() , i=1(1)I. I- число функциональных равенств.
, i=1(1)I. I- число функциональных равенств.
Многомерная безградиентная оптимизация
В данном разделе
рассматриваются численные методы оптимизации, у которых величина и направление
шага к оптимуму формируются однозначно по определенным детерминированным
функциям в зависимости от свойств критерия оптимальности в окрестности текущей
точки без использования производных (т.е. градиента). Все алгоритмы имеют
итерационный характер и для переменной i на j +1 итерации выражаются формулой : ![]()
Для
рассматриваемой группы методов ![]() .
.
Среди этих методов выделим: метод Гаусса - Зайделя,
метод Хука-Дживса, методы деформируемого многогранника ( симплексный метод).
Основная
особенность рассматриваемой группы методов — отсутствие вычисления градиента
критерия оптимальности. Ряд методов прямого поиска базируется на последовательном
применении одномерного поиска по переменным или по другим задаваемым
направлениям, что облегчает их алгоритмизацию и применение.
Многомерная градиентная оптимизация
Величина
шага ![]() в рекуррентном
соотношении:
в рекуррентном
соотношении: ![]() для переменной i на j +1 итерации вычисляется с использованием
градиента целевой функции R(x), т.е.
для переменной i на j +1 итерации вычисляется с использованием
градиента целевой функции R(x), т.е. ![]() .
.
При этом
шаг может определяться с использованием градиента в одной (текущей) или в двух
(текущей и предыдущей) точках. Направление градиента, как известно, показывает
направления наискорейшего возрастания функции, а его модуль — скорость этого
возрастания.
Поисковые
методы оптимизации содержат субъективно
задаваемые параметры, которые существенно влияют на эффективность поиска,
вследствие чего один и тот же метод может дать совершенно различные траектории
поиска.
Среди этих
методов выделим метод сопряжённых градиентов и метод Ньютона. Эти два метода
нашли отражение в программном продукте EXCEL.